КОСМИЧЕСКИЙ КОРАБЛЬ КАК
ОБЪЕКТ УПРАВЛЕНИЯ
Космонавт как оператор в системе
«человек-космический корабль»
- Профессиональный труд космонавта представляет
собой разновидность операторского труда с
использованием высокоавтоматизированной
техники.
- Всю совокупность воздействий, оказываемых
человеком на космический корабль с его
системами, можно разделить на две большие группы:
регулирующие и управляющие воздействия. Первые
имеют целью поддержание каких-либо параметров,
например температуры или давления в кабине в
определенных пределах. Управляющие же
воздействия направлены на выполнение той или
иной программы (например, изменения орбиты
летательного аппарата на определенном участке
космического пространства). Для того чтобы дать
хотя бы некоторое представление о весьма сложной
и многоконтурной системе управления
космического корабля, остановимся коротко на его
устройстве.
- Космический корабль-спутник «Восток» состоит
из двух основных частей: кабины, в которой
размещаются космонавт, оборудование для
обеспечения жизнедеятельности, система
приземления, и приборного отсека с тормозным
двигателем и некоторыми другими устройствами.
- Кабина имеет три иллюминатора, в которые
вставлены жаропрочные стекла. Это позволяет
вести наблюдения даже во время возвращения на
Землю, когда от нагрева в плотных слоях атмосферы
начинает гореть слой тепловой защиты корабля.
Иллюминаторы могут закрываться шторками,
защищающими глаза от прямых солнечных лучей.
- Космонавт находится в специальном кресле, в
котором есть запас кислорода и устройство для
вентиляции скафандра. Опорные поверхности
кресла выложены мягким поролоном, а само оно
снабжено парашютной системой для
катапультирования. Для обеспечения космонавта
нормальным воздухом на корабле размещена
система регенерации и кондиционирования,
автоматически поддерживающая заданные
параметры содержания кислорода, углекислого
газа, температуры и влажности. При желании (или
необходимости) регулировку этих параметров
можно осуществлять вручную.
- Приборы, показывающие влажность, температуру,
давление газовый состав воздуха, расположены в
поле зрения космонавт, на приборной доске. Здесь
же размещены и сигнализаторы — трафаретные
надписи, вспыхивающие при прохождении команд,
возникновении неполадок и т. д. Из всех приборов
на доске выделяется индикатор местоположения
корабля и места посадки. Он представляет собой
глобус, вращающийся относительно двух осей cо
скоростью, соответствующей скорости вращения
Земли и угловой скорости движения корабля в
плоскости орбиты относительно на шей планеты.
Этот прибор позволяет космонавту в любой момен
знать о своем местонахождении и определять место
посадки npи включении тормозного двигателя в
данный момент времени.
- Таким образом, устройства индикации и
сигнализации обеспечивают космонавта
необходимой информацией о режиме полета корабля
и работе его систем.
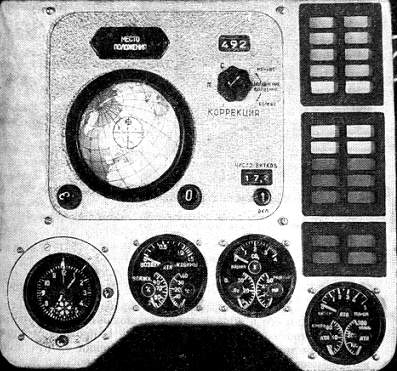
Рис. 3
Приборная доска космического корабля «Восток».
- Система управления кораблем включает в себя
панель информации (т. е. приборную доску), пульт
управления, систему автоматического
регулирования — CAP (см. рис.4). Штриховыми линиями
на приводимой схеме изображены управляющие
воздействия на объект и потоки информации об их
результатам (агрегат включен — выключен и т. д.).
Сплошные линии обозначают регулирующие
воздействия, а также передачу информации об
изменениях регулируемых параметров. В данной
системе функции регулирования в нормальных
условиях полета выполняются автоматически.
Соответствующая информация поступает на
приборную доску, но, не требуя обычно от
оператора ответных реакций, как бы утрачивает
свою сигнальную роль. Кроме того, она носит
весьма монотонный характер. Однако в моменты,
когда CAP не справляется с поддержанием
параметров на требуемом уровне, оператор должен
активно вмешиваться в процесс управления.
- На пульте управления находятся тумблеры и
переключатели для управления шторками и
фильтрами иллюминаторов, регулирования
температуры и влажности в кабине и т. п., а также
ручка ручной ориентации корабля, включатель
ручного управления и тормозного двигателя.
 |
Рис.4
Схема управления космическим кораблем «Восток». |
- Точная ориентация космического корабля в
пространстве, как стабилизация его в
определенном положении, необходимы для
благополучного возвращения на Землю. В противном
случае при включении тормозной двигательной
установки орбита полета может измениться
нежелательным образом, и космический аппарат
превратится в долго обращающийся спутник нашей
планеты. Ориентация и стабилизация корабля
производятся автоматически, но могут
осуществляться и космонавтом (при желании или
при отказе автоматики). Как известно, впервые
ручную ориентацию космического аппарата в
полете произвел Г. С. Титов. В своем отчете он
рассказал по этому доводу следующее: «Через час
полета, прорезая темную-претемную ночь, я, как и
было намечено планом работы, включил ручное
управление кораблем. Признаться, это было
сделано не без внутреннего волнения: ведь еще ни
один человек в мире не заставлял повиноваться
своей воле космический корабль. Подчинится ли он
движениям моих рук? — подумал я и решительно
положил руку на пульт управления. «Восток-2»
выполнил мои желания. Управлять космическим
кораблем оказалось легко. Его можно было
ориентировать в любом заданном положении»
- Понятно, что при ручном управлении космонавт
непрерывно осуществляет соответствующие
функции. Каждый сигнал отклонения от заданного
параметра непосредственно вызывает ответно
действие оператора. Эффективность работы
человека постоянно сверяется и корректируется
по принципу обратной связи, т. е. тем изменениям,
которые этой работой вызываются.
- Система ручной ориентации корабля «Восток»
состоит из оптического ориентатора, ручки
управления, обеспечивающей управление по трем
осям — курсу, тангажу и крену, датчиков угловой
скорости и других элементов.
- Через оптический ориентатор космонавт
определяет положение корабля по отношению к
Земле. Этот прибор установлен на одном из
иллюминаторов кабины. При правильной ориентации
корабля относительно вертикали космонавт видит
изображение горизонта в виде кольца. Через
центральную же часть иллюминатора он
просматривает находящийся под ним участок
земной поверхности. Положение продольной оси
корабля по отношению к направлению полета
определяется по «бегу» земной поверхности в поле
зрения ориентатора. При отклонении от вертикали,
а также при отклонении продольной оси корабля от
направления полета космонавт, действуя ручкой
управления, посылает команды на вход датчиков
угловой скорости. Последние формируют сигналы,
которые подаются на активные двигатели
ориентации и включают их. В результате возникает
вращение корабля. Как только скорость его
достигает заданной величины, двигатель
выключается и поворот продолжается по инерции.
Когда корабль доходит до определенного
положения, космонавт отпускает ручку. Это
приводит к появлению управляющего сигнала,
включающего реактивный двигатель на уменьшение
скорости вращения. При снижении ее до нужной
величины двигатель выключается.
Рис. 5.
Блок-схема системы ручной ориентации
космического корабля «Восток».
- Процесс ручного управления угловым положением
корабля с психофизиологической точки зрения
значительно отличается от аналогичной работы
пилота самолета. Самолет сравнительно быстро
реагирует на управляющие воздействия, тогда как
космический корабль обладает значительной
инерционностью. Это обусловливает необходимость
воспитания у космонавта особых навыков
специальными тренировками.
- Ныне проводятся эксперименты по сближению и
стыковке космических кораблей в космосе.
Отработка этой операции позволит в последующем
выводить на монтажную орбиту отдельные блоки
тяжелых межпланетных кораблей и орбитальных
станций для сборки. Но маневр космического
корабля, идущего на сближение и стыковку, опять
таки значительно отличается от любого маневра
самолета. Космонавту приходится учитывать, что в
космическое пространстве не действуют силы
аэродинамического происхождения. Если одному
космическому кораблю надо догнать другой, то
следует иметь в виду, что включение двигателя на
первом корабле может привести не только к
увеличению его скорости, но и к изменению орбиты.
В итоге догоняющий пройдет мимо объекта
сближения. Короче говоря, процесс управления
космическим кораблем и соответствующие навыки
космонавта должны быть во многом иные, чем у
летчика. К этому надо добавить, что кратчайший
путь к сближению в ряде случаев будет идти не по
прямой, а по некоторой кривой и что при большом
удалении от нашей планеты возникает
необходимость пользоваться системой координат,
отличающейся от привычной земной. Особенно
возрастает роль космонавта на последнем участке
стыковки, когда человек включается в ручное
управление. Скорость корабля здесь не должна
превышать нескольких метров в секунду
относительно объекта стыковки, чтобы стало
возможным безударное сцепление, но с силой,
достаточной для срабатывания стыковочных
замков. Естественно, что космический аппарат
необходимо сориентировать соответственно
стыковочным узлам.
- Таким образом, анализ ряда рабочих операций
космонавта показывает, что он должен уметь
управлять различными системами космического
корабля и самим кораблем в необычных условиях,
выполняя необычные задачи и требования. А это
немыслим без адекватного отражения
пространственных отношений и течения времени.
Далее…